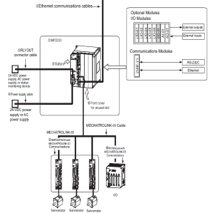
MP3300iec
El controlador de movimiento más poderoso, de última generación.


El controlador MP3300iec ofrece la tecnología de control más avanzada en la línea MPiec, además de control para 62 ejes de movimiento y hasta 8 ranuras para módulos opcionales.
Características
Protocolos de comunicación
- Estándares abiertos EtherNet / IP, Modbus / TCP y otros para conectividad a muchos dispositivos periféricos del mercado.
Lenguajes de programación estándar
- IEC61131-3 significa que los programas se desarrollan y ejecutan con un comportamiento predecible.
Salidas de amplificador programables
- El controlador puede operar salidas SERVOPACK locales. Esto reduce el costo del panel y los requisitos de espacio cuando solo se necesitan un par de salidas.
Puesta en servicio centrada en el controlador
- La red de movimiento MECHATROLINK proporciona un canal para configurar la máquina desde una única ubicación con una herramienta de software.
Multitud de opciones
- Elija entre ocho tarjetas de opción que se ofrecen para las ranuras de expansión para adaptarse a la mayoría de los requisitos de la máquina.
E / S remotas
- Utilice los módulos VIPA SLIO EtherNet / IP de Yaskawa para satisfacer todas sus necesidades de E/S remotas. Numerosas E/S remotas de terceros, como Phoenix, Wago y Opto 22, también pueden interactuar con el sistema a través de MECHATROLINK III y Ethernet.
Web Server
- Un servidor web integrado ofrece información de diagnóstico del controlador estándar, lo que elimina la necesidad de software especial para el personal de mantenimiento.
Código G RS-274 disponible con todas las bibliotecas kinematics de Yaskawa
- 4 grados de libertad (se requiere MP3300iec-ER y caja de herramientas de control simultáneo de 5 ejes para obtener 6 grados de libertad completos)
- Interpolación lineal, interpolación circular y seguimiento de tangente
- Desplazamiento del sistema de coordenadas de trabajo y desplazamiento de la herramienta
- Pausar, continuar y anular la velocidad de alimentación